


Вчені розробили квадрокоптер, який вміє змінювати форму, наприклад, для подолання вузьких проходів у приміщенні.
Редакція ПМ
UZH
Хоча дрони можуть допомогти в дослідженні важкодоступних, небезпечних місць, наприклад територій, постраждалих при природних катастрофах, у них є один істотний недолік: ці апарати, як правило, досить широкі — не протиснутися, наприклад, у вузькі отвори в будівлі. Новий експериментальний дрон, розроблений швейцарськими дослідниками, пробує вирішити дану проблему: він вміє складатися — і в такому вигляді може подолати досить вузький прохід.
UZH
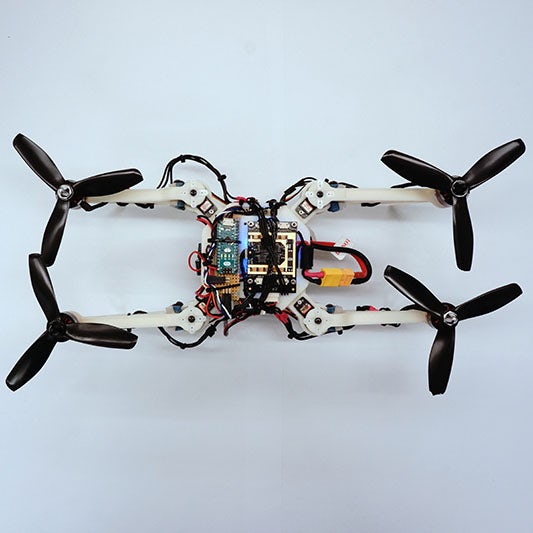
У початковому вигляді «руки» квадрокоптера, на яких розташовуються ротори, мають звичну X-подібну (якщо дивитися зверху) конфігурацію. При цьому коли апарату необхідно протиснутися у вузький вертикальний отвір, дві фронтальні «руки витягуються вперед, дві задні — назад: таким чином дрон стає значно вже. Є й інші варіанти для складання «рук» дрона: наприклад, коли квадрокоптеру треба пройти через горизонтальний отвір, все «руки» дрона можуть скластися — і апарат також стане відчутно менше.

UZH
Всі чотири «руки» дрона управляються незалежно окремими сервомоторами, які, в свою чергу, контролюються спеціальними мікропроцесором. Відзначається також, що тяга кожного з роторів налаштовується автоматично, щоб забезпечувати стабільний політ апарата при різних конфігураціях.
Дослідники, які розробили прототип, сподіваються в майбутньому зробити апарат ще більш автономним. Робота, присвячена розробці, опублікована в журналі IEEE Robotics and Automation Letters, а коротко про неї повідомляє портал New Atlas.








Thanks!
Our editors are notified.